Управление роботом с пульта
Для управления роботом с пульта необходимо написать программу и запустить её на роботе.
Пример взаимодействия с пультом
- Напишите алгоритм для использования пульта в TRIK Studio.
- Подключите контроллер к компьютеру и загрузите написанную программу на робота.
- Подключите смартфон к контроллеру, выбрав сеть контроллера.
- Откройте приложение TRIK Gamepad на вашем смартфоне.
- Выполните алгоритм на контроллере.
Алгоритм программы
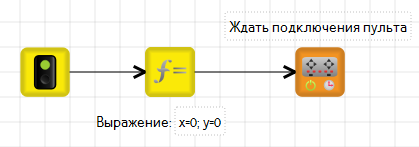
- Введите переменные для координат касания до геймпада —
xиy— и инициализируйте их, присвоив им нулевые значения в блоке «Выражение»:

- Добавьте блок «Ждать подключения пульта»:
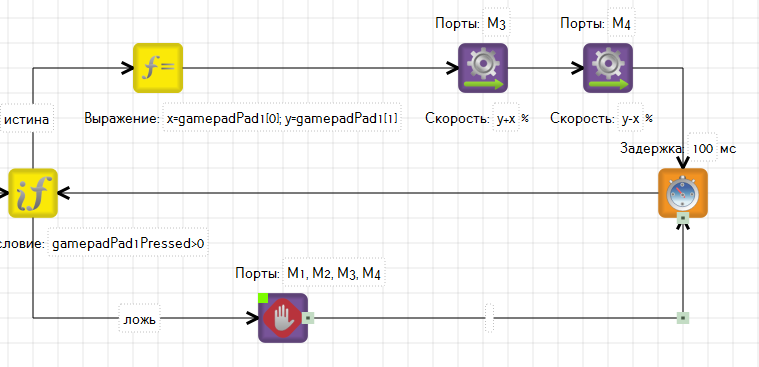
- Для проверки нажатия на геймпаде на левую область (Pad1) добавьте блок «Условие» с условием
gamepadPad1Pressed> 0:

- В случае, если касания нет, необходимо моторы останавливать. Для этого добавьте блок «Моторы стоп»:

- Если на геймпаде нажата область Pad1, необходимо получить координаты касания. Для этого используйте массив
gamepadPad1в блоке «Выражение»:

- После получения координат добавьте простой регулятор с помощью блоков «Моторы вперед». Смещение по координате
Yотвечает за скорость робота, а поX— за поворот.

- Для замыкания условия добавьте блок «Таймер» со значением
100 мc(в программе это время для нового обращения к пульту).

- Замкните цикл на блоке «Условие» связью от блока «Таймер».
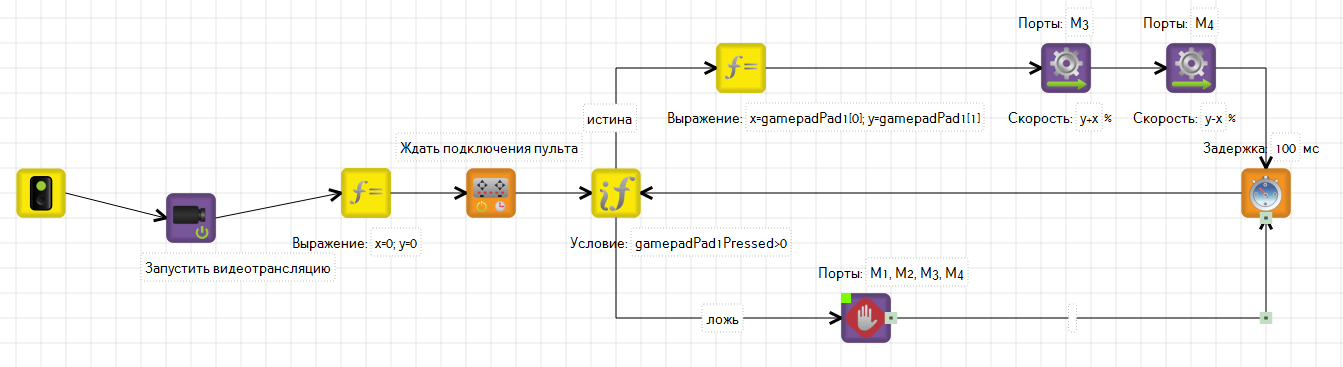
- Если у вас есть видеокамера, добавьте блок «Запустить видеотрансляцию» в начало программы:

Общий вид алгоритма
к сведению
Готовую программу вы можете найти в корневой папке с TRIK Studio /examples/trik/remoteControl или скачать здесь.